ربات جوشکاری میگ با کیفیت بالا چینی برای جوشکاری فولاد ضد زنگ







بدن ربات
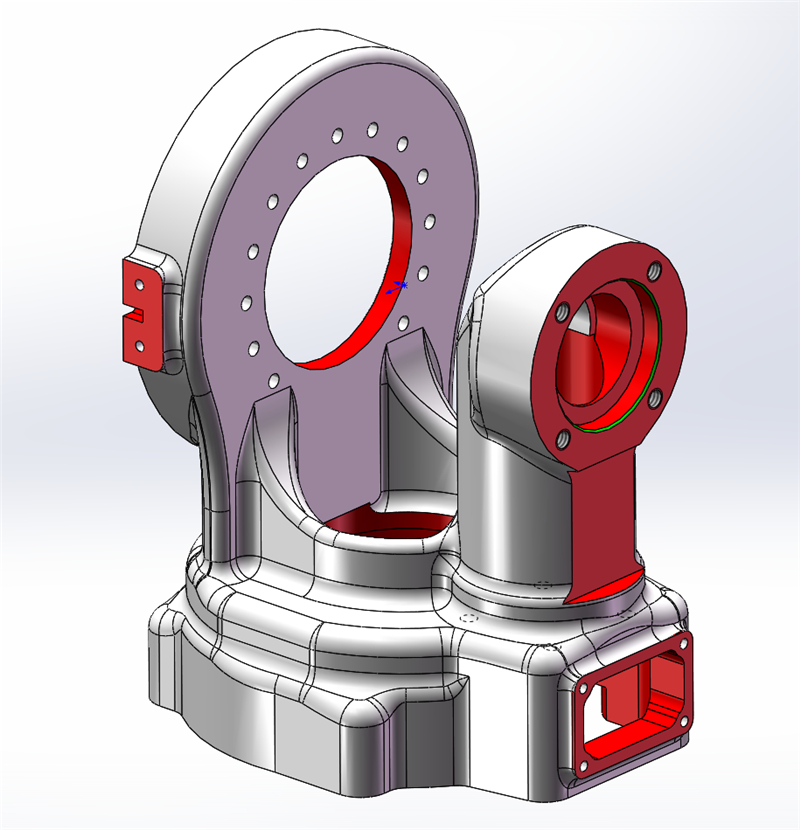
ربات JHY عمدتاً در فرآیند ریختهگری تحت فشار و طراحی جزئیات بدنه تغییر میکند. تیم تحقیق و توسعه ما نوآوریهای زیادی در طراحی بدنه ربات ایجاد کرده و بیش از ده اختراع جدید ثبت کرده است.
برای مثال، محور ششم یک مکانیزم انتقال با دقت بالا توسعه داده و میلههای تقویتکننده طراحی شدهاند، همچنین دیسک خروجی چرخ ششم از طراحی بدون چرخدنده استفاده میکند که دقت و پایداری ربات را تا حد زیادی بهبود میبخشد. حتی اگر مشعل جوشکاری در وضعیت دشواری کار کند، همچنان میتواند پایداری و بدون لرزش را تضمین کند. این نکته توسط مشتریان داخلی ما تأیید شده است.
بدنه ربات با فناوری ریختهگری تحت فشار تولید میشود، این امر باعث میشود رباتهای ما با چگالی بالا، سبکتر باشند. بازوی جلویی میتواند باریکتر و بلندتر باشد، نسبت بین بازوی بالایی و بازوی جلویی به نسبت طلایی نزدیکتر است، بنابراین انعطافپذیرتر و سریعتر حرکت میکند.
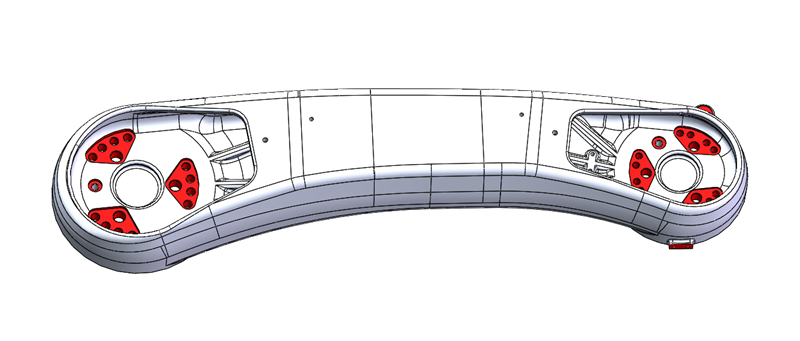
طراحی کلی
طراحی بازوی جلویی ربات مستقیم، سادهتر و ظریفتر است. با حس طراحی، بیشتر با زیباییشناسی بازار اروپا مطابقت دارد. طراحی بدنه ربات برای تعدادی از اختراعات فنی درخواست شده است، بدنه ربات جدید بینقصتر است.
برترین برندهای سیم و کابل
سیمها و ترمینالهای داخلی ربات توسط برندهای برتر ژاپنی مانند DYEDEN، TAIYO، همانند ABB و Fanuc ساخته شدهاند.
ترمینال: برند ایتالیایی Yierma.
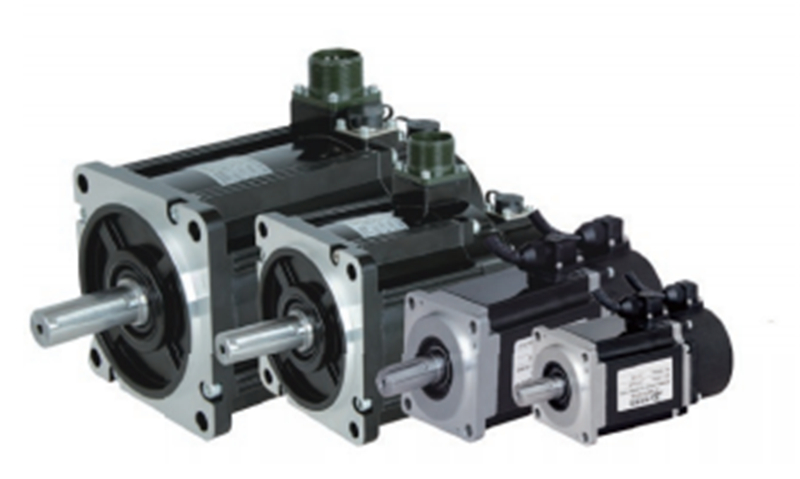
برندهای پیشرو سروو موتور / درایور / کاهنده سرعت
همه آنها از برندهای پیشرو در چین استفاده میکنند. هر برند قبل از تصمیمگیری نهایی، مدت زیادی مورد آزمایش و بررسی قرار گرفته است تا اطمینان حاصل شود که این برندها برای استفاده در رباتهای ما مناسب هستند و کیفیت و عملکرد آنها پایدار و قابل اعتماد است.
محورهای J1 و J2 از طراحی سه شفت خارج از مرکز با گشتاور تا 65 نیوتن متر استفاده میکنند که باعث کاهش ساییدگی دنده و افزایش عمر مفید کاهنده میشود. کاهندههای محورهای J1 و J3 ربات JHY در حال حاضر بالاترین پیکربندی در چین هستند.
در مورد سروو موتور، اکنون ما حداکثر از موتور ۳ کیلووات برای رباتها استفاده میکنیم.
برای رباتهای ۱.۸ متری و ۲ متری، نیروی محرکه مورد نیاز برای محورهای اول و دوم بیشتر است و الزامات مربوط به توان موتور نیز بیشتر است.
موتورهای با دقت بالا و چند منظوره میتوانند به طور کامل تقاضای کاربرد برای ربات ما را برآورده کنند.

۳ سال/۷۵۰۰ ساعت بدون نیاز به تعمیر و نگهداری
تعمیر و نگهداری ساده است، خود مشتریان میتوانند به راحتی کار کنند.
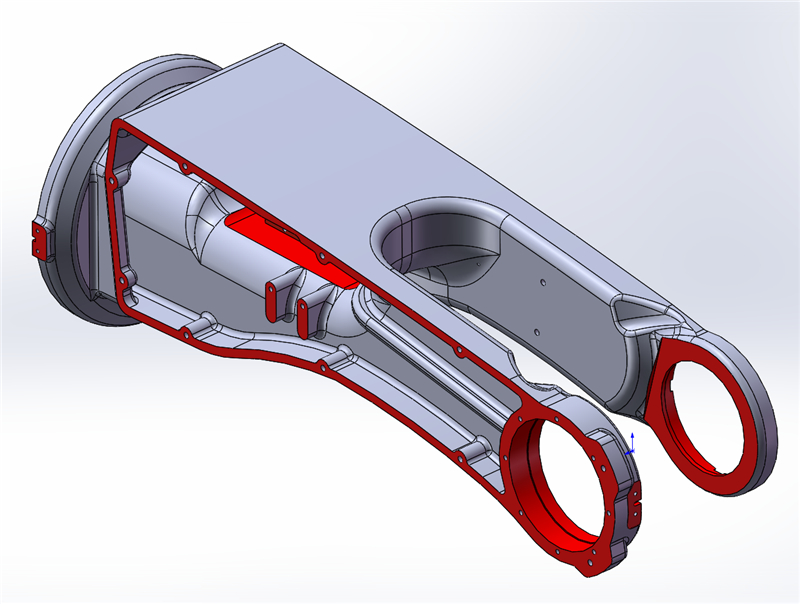
سایر اختراعات و طرحها
انتقال قدرت ثانویه ۶ محوره به دو اتصال تسمهای تغییر یافته، نسبت انتقال قدرت افزایش یافته و مشکل حرکت سریع و نادرست ۶ محوره حل شده است. دیسک خروجی محور ششم بدون چرخدنده و با مکانیزم انتقال قدرت با دقت بالا طراحی شده است که دقت حرکت محور ششم را بهبود میبخشد... در حال حاضر ما بیش از ۳۰ اختراع ثبت شده مرتبط برای ربات جوشکاری داریم.
ویدئو
پارامترها
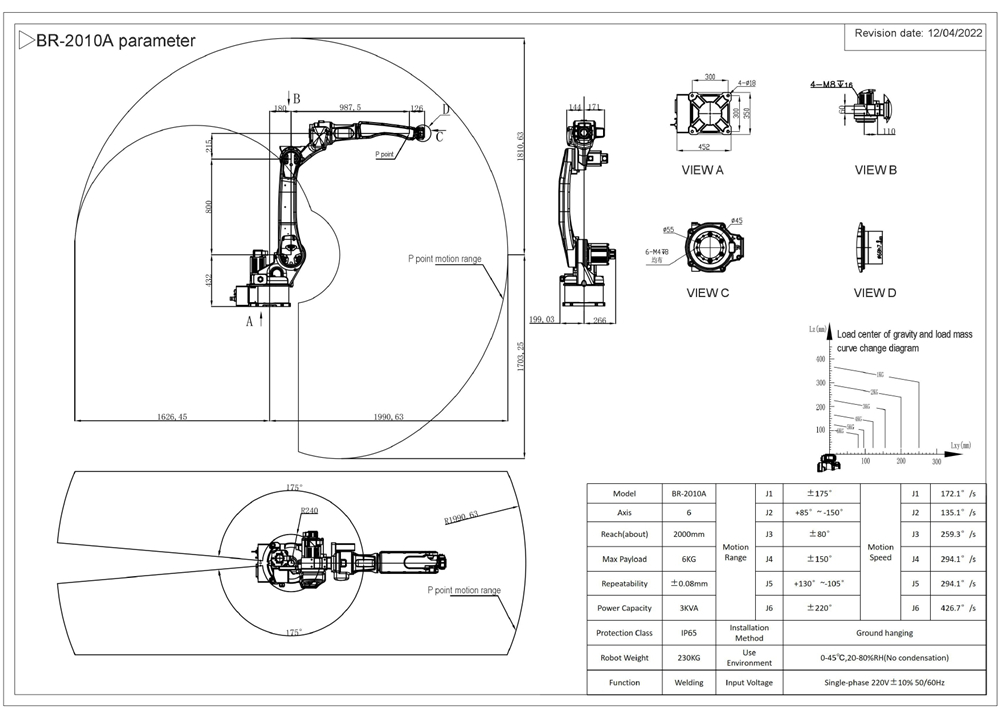
| مدل | BR-2010A | محدوده حرکت | J1 | ±۱۷۵ درجه | سرعت حرکت | J1 | ۱۷۲.۱ درجه بر ثانیه |
| محور | 6 | J2 | +85°~ -150° | J2 | ۱۳۵.۱ درجه بر ثانیه | ||
| دسترسی (حدود) | ۲۰۰۰ میلیمتر | J3 | ±۸۰ درجه | J3 | ۲۵۹.۳ درجه بر ثانیه | ||
| حداکثر ظرفیت ترابری | 6 کیلوگرم | J4 | ±۱۵۰ درجه | J4 | ۲۹۴.۱ درجه بر ثانیه | ||
| تکرارپذیری | ±0.08 میلیمتر | J5 | +130°~-105° | J5 | ۲۹۴.۱ درجه بر ثانیه | ||
| ظرفیت برق | ۳ کیلوولت آمپر | J6 | ±۲۲۰ درجه | J6 | ۴۲۶.۷ درجه بر ثانیه | ||
| کلاس حفاظت | IP65 | روش نصب | آویزان شدن از زمین | ||||
| وزن ربات | ۲۳۰ کیلوگرم | از محیط استفاده کنید | 0-45℃، 20-80%RH (بدون چگالش) | ||||
| عملکرد | جوشکاری | ولتاژ ورودی | تک فاز ۲۲۰ ولت ± ۱۰٪ ۵۰/۶۰ هرتز | ||||
دسته بندی محصولات
-

ربات جوشکاری MIG با پاشش کم ۶ محوره، برد ۱۸۰۰ میلیمتر
-

ربات جوشکاری 6 محوره MIG MAG با برد 1500 میلی متر ...
-

ربات جوشکار با کیفیت بالا که برای جوشکاری مبلمان استفاده میشود
-

دستگاه قوس الکتریکی اتوماتیک صنعتی بازوی ربات JHY 6 محوره ...
-

ربات جوشکاری با شعاع دسترسی 2000 میلیمتر برای جوشکاری لولههای کربنی ...
-

ربات جوشکاری MIG با دهانه 2000 میلیمتر برای فولاد ضد زنگ...